


Table of Contents
- How to Write Helper Functions in Python TOP
- How to Write Comments in Python TOP
- How to Write Docstrings in Python TOP
- How to Write Variables in Python TOP
- How to Write Data Types in Python TOP
- How to Write Numbers in Python TOP
- How to Write Integers in Python TOP
- How to Write Floats in Python TOP
- How to Perform Operations With Numbers in Python TOP
- How to Write Booleans (True/False) in Python TOP
- How to Write Comparisons in Python TOP
- How to Write Strings in Python TOP
- How to Write String Indexing in Python TOP
- How to Write Important String Methods in Python TOP
- How to Format Strings in Python TOP
- How to Write Lists in Python TOP
- How to Write List Indexing and Slicing in Python TOP
- How to Use List Operations in Python TOP
- How to Write Tuples in Python TOP
- Tuple Indexing and Slicing TOP
- How to Use Tuple Operations in Python TOP
- How to Write Dictionaries in Python TOP
- How to Use Dictionary Operations in Python TOP
- How to Use Dictionary Methods in Python TOP
- How to Write Conditionals (if, elif, else) in Python TOP
How to Write Helper Functions in Python TOP
dir(...)
Show information about objects.
x = 'This is a string'
dir(x)type(...)
Show the data type of a given object.
x = 5
type(x)print(...)
Prints (shows on the screen) the value of the expression between the parentheses.
print('Hello world')x = 2
print(x)
How to Write Comments in Python TOP
- Special lines of code that the computer will NOT execute
- Comments are meant to be read by humans only
- Useful to explain complicated logic, or provide more details or documentation
- Everything to the right of # sign is considered a comment
Single Line Comments
# This is a single line comment. The computer will not execute this line.x = 45 # This is an inline comment. Only characters to the right of # sign are part of the comment.
Multi-Line Comments
# This is a multiline comment.
# If you need to write a comment on multiple lines,
# you must remember to start each comment line with the # sign.
How to Write Docstrings in Python TOP
- Documentation strings
- Typically used at the beginning of a function definition to explain what the function does, what inputs / outputs it has etc.
Single Line Docstrings
"""This is an example of a docstring. """
Multi-Line Docstrings
"""
This is a
multiline
docstring
"""
Docstrings in Practice
def double_num(n):
"""
This function multiplies the given number
by 2 and returns the result.
"""
return n*2
How to Programmatically Access a Function's Docstrings
# The code below will print the documentation
# string for the doule_num function.
print(double_num.__doc__)
How to Write Variables in Python TOP
- Are used to store data that needs to be accessed later
- Can be (almost) any word, except for so-called reserved words, which are used by the Python language
- Examples of reserved words: if, for, True, while, not, and, or, ...
- Have a name and a value
- By convention you should use all lowercase for variable names
- By convention you should use underscores to separate multiple words in a variable name (e.g. first_name)
- Variable names MUST start with a letter (not a number, etc.)
- Variables are assigned values using the = sign
- NOTE: you can use the print built-in function to print the values of a variable to the screen
# Below, the variable count will be given the value 15.
count = 15# Below, the variable my_count will be assigned the value 0.
my_count = 0# Below, the variable first_name will be assigned the text 'James'
first_name = 'James'# Below, the variable counter will be updated to be equal to
# the old value plus 2
counter = 10
counter = counter + 2
# The variable counter is now equal to 12
How to Write Data Types in Python TOP
- Data in a program can be anything: text, numbers, dates, images, binary, etc.
- The type of data is important to know because different types have different abilities
- You can divide numbers, but not lines of text
- Python has built-in support for multiple data types, as seen below
Here are some of the built-in data types:

Image Source: Basic Python Data Types, Edlitera
How to Write Numbers in Python TOP
- Python has several data types for representing numbers
- Int for whole numbers (integers)
- Float for real numbers (CAUTION: when doing math with floats, you may not get very precise results!)
- Decimals also for real numbers (decimals, unlike floats, will do proper math)
# This is an integer
11# This is a float
2.78# The variable a is assigned the integer value 3.
a = 3# The variable b is assigned the integer value 5.
b = 5Below, Python will replace a with the actual value that it stores (in this case, 3), and b with the actual value that it stores (in this case, 5) and then do the math.
a = 3
b = 5
a + b
a - b
a * b
a / b
How to Write Integers in Python TOP
- Numbers without a decimal component
- Can be created from text or from other numbers
- Immutable
# Below we create an integer from the text '5'
number = int('5')# Below we create an integer from the float number 5.67
number = int(5.67)
How to Write Floats in Python TOP
- Floating-point numbers (numbers with a decimal component)
- Can be created from text or from other numbers
- Immutable
# Below we create a float from the text '5.67'
number = float('5.67')# Below we create a float from the integer number 5
number = float(5)
The Problem With Floats
# The math expression below should evaluate to 0...
# except it doesn't.
1.1 + 1.1 + 1.1 - 3.3If you actually evaluate the code above, you will get something like 4.440892098500626e-16. Close to 0, but not quite. This is because floats are not precise. The way around this is to use the Decimal module (more on modules in a bit):
from decimal import Decimal
Decimal('1.1') + Decimal('1.1') + Decimal('1.1') - Decimal('3.3')This will evaluate to Decimal('0.0'), which is the correct, precise result.
How to Perform Operations With Numbers in Python TOP
Python uses the following operators:
- + for addition
- - for subtraction
- * for multiplication
- / for float division (the result will be a float number)
- // for integer division (the result will be an integer number)
- ** for exponentiation
- % for computing the remainder
You can combine the operators as many times as you want:
# This does a bunch of math.
# Notice how we use a mix of integers and floats
# and a variety of operators.
((5 + 6) * 11) / 3.45) ** 3
Addition
You can add two integers. The result will be an integer.
5 + 6You can add an integer and a float. The result will be a float.
4.1 + 6You can add two floats. The result will be a float.
Caution: operations with floats are imprecise. See the Decimal data type for more precise operations with numbers with decimals.
1.1 + 3.5Subtraction
You can subtract an integer from another integer. The result will be an integer.
7 - 2You can subtract an integer from a float (or vice-versa). The result will be a float.
9.6 - 3You can subtract a float from another float. The result will be a float.
1.7 - 3.98Multiplication
You can multiply integers. The result will be an integer.
12 * 10You can multiply floats. The result will be a float.
1.45 * 4.32You can multiply a float by an integer. The result will be a float.
7.3 * 5Division
There are two types of division: / and //
- / returns a float (a number with decimal points)
# The code below will return 1.6666666666666667
5 / 3- // returns an integer result (basically it rounds the result down). This is called floor division.
# The code below returns 1
5 // 3
Modulo Operator (%)
Use the % to get the remainder of the division.
# The code below returns 0 (4 = 2 * 2 + 0)
4 % 2
# The code below returns 1 (5 = 2 * 2 + 1)
5 % 2
Exponentiation (x to the nth Power)
Use ** to raise a number to a given power.
# The code below returns 8 (2 * 2 * 2)
2 ** 3Using Variables
All the operations can be performed with variables that store numbers, instead of with numbers directly. For example:
a = 2
b = 3
# The code below prints 6
print(a * b)
# The code below prints 8
print(a ** b)
# The code below prints 0
a // b
# After the code below executes,
# variable c will store the value 14
c = (a + b) * a + 4
How to Write Booleans (True/False) in Python TOP
- Boolean variables store a value of either True or False
- They are often used when evaluating expressions to determine whether they are True or False
- True and False are defined by the Python programming language
# The is_smaller variable below is of type bool.
# We say that it is a boolean. In this case, it stores the
# value True because '1 is less than 5' is a true statement.
is_smaller = 1 < 5
False Values
In addition to the boolean value False, Python evaluates the following values to False (they are equivalent to False in an if statement, for example):
- Empty lists []
- Empty tuples ()
- Empty dictionaries {}
- Empty sets set()
- Empty strings ''
- The integer number 0
- The floating point number 0.0
- None
# All the examples below will print 'no'
# Example 1 - will print 'no'
if []:
print('yes')
else:
print('no')
# Example 2 - will print 'no'
x = 0
if x:
print('yes')
else:
print('no')
# Example 3 - will print 'no'
if '':
print('yes')
else:
print('no')
Truth Values
In addition to the boolean value True, Python evaluates any expression that does not have a false value (see above) to True. Some examples:
- The list [1, 2, 3]
- The list [None]
- The list ['']
- The tuple ('a', 'b')
- The dictionary {'a': 1, 'b': 2}
- The set set(5, 6)
- The string 'hello'
- The integer number -1
- The floating point number 4.67
# All the examples below will print 'yes'
# Example 1 - will print 'yes'
if [None]:
print('yes')
else:
print('no')
# Example 2 - will print 'yes'
x = -1
if x:
print('yes')
else:
print('no')
# Example 3 - will print 'yes'
if 'hi':
print('yes')
else:
print('no')
How to Write Comparisons in Python TOP
- Expressions that have the value of either True or False
To check for equality, use ==
# The boolean value of the expression below is True
1 == 1
# In other words, the variable c below will store the value True
c = (1 == 1)
# The boolean value of the expression below is False
1 == 5
# In other words, the variable c below will store the value False
c = (1 == 5)To check for inequality, use !=
# The boolean value of the expression below is False
1 != 1
# In other words, the variable c below will store the value False
c = (1 != 1)
# The boolean value of the expression below is True
1 != 5
# In other words, the variable c below will store the value True
c = (1 != 5)Other comparisons: less than <, less than or equal <=, greater than >, greater than or equal >=
# The boolean value of the expressions below is True
1 < 10
1 <= 1
1 <= 2
5 >= 3
# The boolean value of the expressions below is false
5 > 7
1 <= 0You can negate comparisons using the logical operator not
# The boolean value of the expression below is False
not True
# In other words, the variable c below will store the boolean value False
c = (not True)
# The boolean value of the expression below is True
not False
# In other words, the variable c below will store the boolean value True
c = (not False)
# The expression below evaluates to False because 1 < 10 is True
# and not True is False
not 1 < 10
# The expression below evaluates to True because 1 != 1 is False
# and not False is True
not 1 != 1You can combine comparisons
If you have several comparisons and you want to check if at least one of them is True, use the logical operator or
# The expression below evaluates to True because '1 < 5' is True.
# Note the 'or' operator used to combine the two comparisons.
1 < 5 or 6 > 7Below, a stores the integer value 5 and b stores the integer value 3. The expression evaluates to True because a > b is True (5 > 3).
a = 5
b = 3
# This expression evaluates to True
a > b or a != 5 or a != 0The Truth table for the or operator. As long as one of the comparisons is True, the result will be True.
| Boolean value of comparison A | Boolean value of comparison B | Comparison A or B |
| True | True | True |
| True | False | True |
| False | True | True |
| False | False | False |
If you have several comparisons and you want to check that ALL of them are True, use the logical operator and
# This is False because while '1 < 5' is True,
# '6 > 7' is False, so in this case not ALL
# comparisons are True.
1 < 5 and 6 > 7Below, a stores the integer value 5 and b stores the integer value 1. The expression evaluates to False because a != b is True (5 != 1), BUT a < b is False.
a = 5
b = 1
a != b and a < bThe truth table for the and operator. If any of the comparisons is False, the result will be False.
| Boolean value of comparison A | Boolean value of comparison B | Comparison A and B |
| True | True | True |
| True | False | False |
| False | True | False |
| False | False | False |
How to Write Strings in Python TOP

Image Source: Happy Birthday string sign, Shopee.com
- Python data type used for representing text - think "letters on a piece of string"
- Strings are immutable (once created, they cannot be modified!)
- You mark some piece of data as a string by wrapping it in or (e.g. "this is a string", 'hi', "2005")
- If the text contains a ', use " to mark it as a string and vice-versa (e.g. "she said 'hi'", 'i said "hello"')
Single Line String
example = "This is a string"another_example = 'This is also a string'
Multiline String
example = """This is
a multiline
string"""
More Examples of Strings
# Below, we create a string variable called my_text
my_text = 'This is a string'# You can use double quotes for strings as well.
some_other_text = "This is also a string"NOTE: Pay attention not to confuse strings with integers!
# Below, count is also a STRING variable, not an integer variable
# Even though it only contains digits, the digits are wrapped
# in single quotes, so the whole thing becomes a string.
count = '15'Compare the code above, with the code below:
# Below, another_count is an INTEGER variable. Notice
# the lack of single or double quotes.
another_count = 15There is no difference between strings created with single quotes and strings created with double quotes. Having both of those options, allows you to navigate certain tricky situations, as you can see below:
# If your text contains single quotes, use double quotes
# when you create the string.
line = "You can use ' in a string"
# If your text contains double quotes, use single quotes
# when you create the string.
another_line = 'You can also use " in a string'Compare the lines of code above, with the line below, which will actually cause an error. A string containing single quote characters cannot be created using single quotes. Similarly, a string containing double quote characters cannot be created using double quotes. This is because Python gets confused and doesn't know where the string actually ends.
# This code will not work!
bad_string = 'Can you find what's wrong with this string'However, there is a way around these limitations using certain special characters (escape characters). See the section below on characters with special meaning.
Empty Strings
Sometimes, it's useful to create empty strings (strings which have no characters).
You can easily create these using either single quotes or double quotes, as you can see below:
# The empty_string variable below contains an empty string.
# Same for another_empty_string.
empty_string = ''
another_empty_string = ""Other Ways of Creating Strings With str( )
In addition to just using single or double quotes, you can also create strings using the built-in str function (or constructor, if you will). This is useful when you want to convert between data types (process also called type-casting).
# Below, we create a string by type-casting an integer to a string.
string_example = str(5)
# Usually, you need to do this to 'convert' an integer to a string.
some_number = 1234
string_representation = str(some_number)In the code above, some_number stores an integer, while string_representation stores a string. Basically, the same data (the number 1234) can be represented as either an integer or a string, depending on what kind of transformations or operations you need to do with it. Having a string is useful if you want to append letters at the end of a number, for example. Having an integer is useful if you want to do math operations (e.g. add, multiply, etc.).
More examples of using str()
# This will 'convert' a float to a string.
# 26.3 is a float, but the variable speed
# will be a string.
speed = str(26.3)# This code will not do much. It will take a string
# and create a string with the same content.
example = str('hello')Characters With Special Meanings in Strings
\n is used to indicate a new line
# The code below will print 'hello' on one line and 'world'
# on the next line.
print("hello \n world")\' is used to indicate a single quote inside a string created with single quotes. Basically, the sequence of characters \' is treated as a single quote.
# The code below works! If executed, it will print
# He said 'Hello, sir'
greeting = 'He said \'Hello, sir\'.'
print(greeting)\" is used to indicate a double quote inside a string created with double quotes. Basically, the sequence of characters \" is treated as a double quote.
# The code below works! If executed, it will print
# He said "Hello, sir"
greeting = "He said \"Hello, sir\"."
print(greeting)\\ is used to indicate a single backslash \
# The code below will print
# C:\Users\JamesBond
file_path = "C:\\Users\\JamesBond"
print(file_path)NOTE: The code below will not work, because \ on its own has a special meaning (it is used to define other special characters, as you can see above). So when Python sees a single backslash, it will look at the character(s) immediately after it and try to interpret the whole thing as a special character.
# THIS WILL NOT WORK!
file_path = "C:\Users\JamesBond"
print(file_path)
# Use this instead
file_path = "C:\\Users\\JamesBond"
print(file_path)
# Or this
file_path = r"C:\Users\JamesBond"
print(file_path)Raw Strings
Adding an r before a string tells Python to treat \ as a regular character, as opposed to a character that can be used to define special characters.
# The code below will print
# C:\Users\JamesBond
file_path = r"C:\Users\JamesBond"
print(file_path)
# The code below will print:
# Hello \n World
print(r"Hello \n World")
# Compare that to the code below, which will print:
# Hello
# World
print("Hello \n World")How to Concatenate Strings
Use the + operator:
# The code below will print
# James Bond
agent_name = 'James ' + 'Bond'
print(agent_name)You can concatenate as many strings as you want:
# The code below will print
# Hello, James Bond
first_name = "James"
last_name = "Bond"
greeting = "Hello, "
print(greeting + first_name + " " + last_name)How to Replicate Strings
You can replicate strings using the * operator:
# The code below will print
# hahaha
reaction = "ha"
print(reaction * 3)If you multiply by 0, you will get the empty string:
# The code below will print nothing (the empty string)
reaction = 'ha'
print(reaction * 0)Article continues below
Want to learn more? Check out some of our courses:
How to Write String Indexing in Python TOP
An index is an integer number that indicates the location of an item in a sequence. Strings are sequences of characters. Therefore, you can use integer numbers to access specific characters or substrings of a string.
Positive Index
Counts ascending from left to right, starting at 0, as you can see below on the example string "happy birthday."
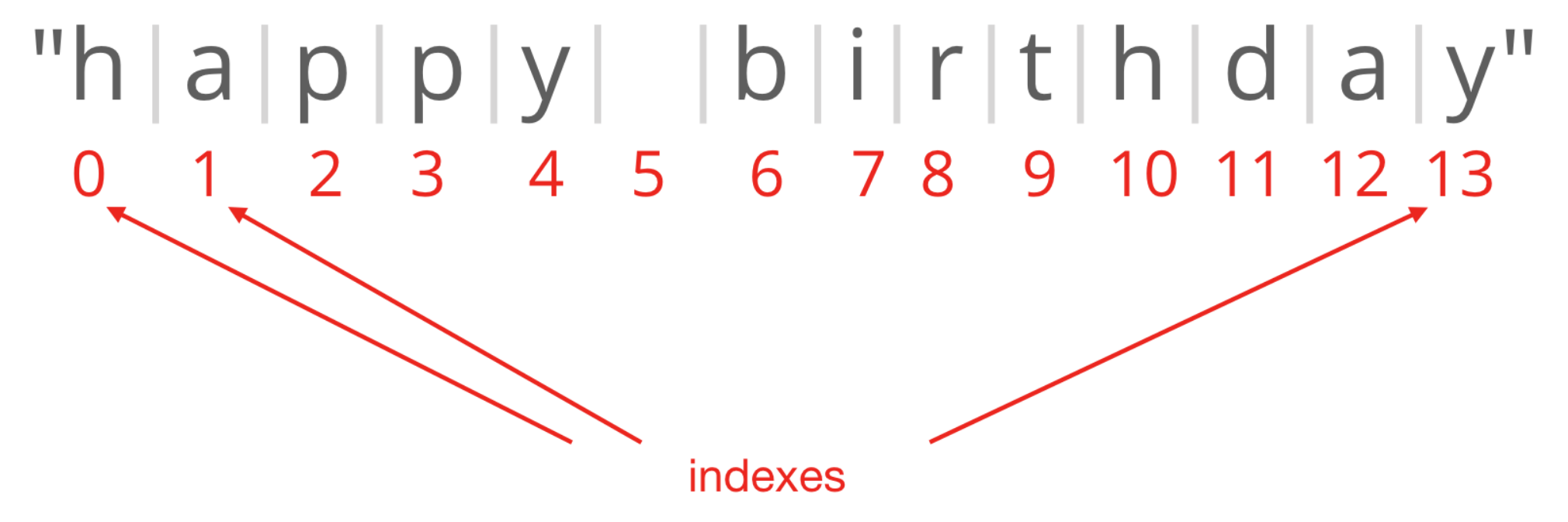
Image Source: Indexing "Happy Birthday," Edlitera
Negative (Reverse) Index
Counts descending from right to left, starting at -1, as you can see below on the example string "happy birthday."
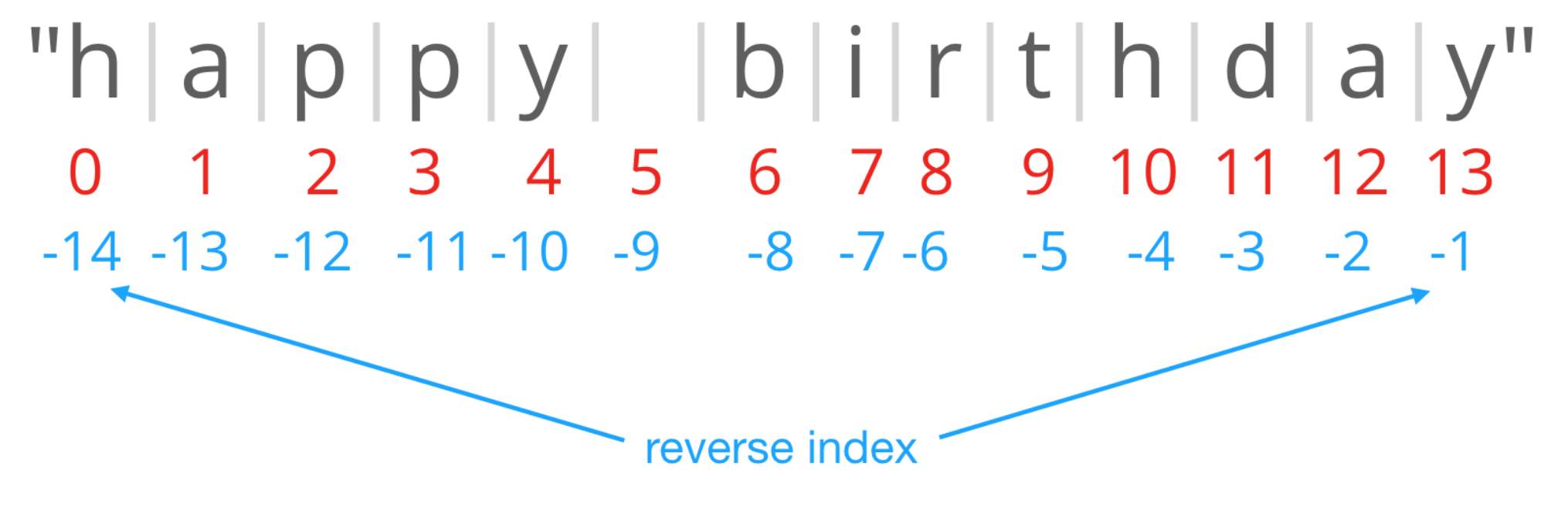
Image Source: Reverse Indexing "Happy Birthday," Edlitera
How to Access Individual Characters in a String Using Indexes
For the examples below, consider the following example string:
greeting = 'happy birthday'How to access the first character in a string:
greeting[0]How to access the last character in a string:
greeting[-1]How to access the 4th character in a string:
greeting[3]CAUTION: Because the counting starts at 0, the 4th character in the string is actually at index 3. This is easy to verify by counting: the first character is at index 0, the second character is at index 1, the third character is at index 2 and the fourth character is at index 3.
How to Access Parts of a String (Substrings) Using Indexes
This operation is also called slicing.
For the examples below, consider the following string:
greeting = "happy birthday"How to get the first 5 characters of a string:
greeting[:5]How to get the last 5 characters of a string:
greeting[-5:]How to get all characters starting at index 1 (second character), going all the way up to and including the character at index 4 (fifth character):
# The code below will print
# appy
greeting = 'happy birthday'
print(greeting[1:5])How to get every other character in a string:
# The code below will print every other character in the original string:
# hpybrha
greeting = 'happy birthday'
print(greeting[::2])How to print every n-th character in a string:
# The code below will print
# 0369
numbers = '0123456789'
print(numbers[::3])
# The code below will print
# 147
numbers = '0123456789'
print(numbers[1:9:3])General rule for extracting substrings from strings:
string_variable[start_index:stop_index:step_size]Where to Place Indexing:
- start_index indicates the index where you should start
- end_index indicates the index where you should end (this will not be included in the result!)
- step_size indicates how many character to skip at each step
Notes:
- The start_index, end_index and step_size are all optional
- The element at end_index will not actually be returned
- step_size can be negative (you can return the reverse of a substring)
How to Check if a String is Part of Another String
The easiest way is to use the in operator:
# The code below will evaluate to True
# because 'hello' is part of 'hello world'
'hello' in 'hello world'
# In other words, the variable c below will
# be assigned the value True
c = 'hello' in 'hello world'Capitalization is important when using the in operator:
# The code below will evaluate to False
# because 'Hello' is not actually part of 'hello world'
# due to the difference in capitalization.
'Hello' in 'hello world'Pay attention to the data types used when using the in operator:
# This does not work because 1 is an integer.
# An integer cannot be part of a string. This
# code will throw an error.
1 in '1234' But this will work:
# This works because '1' is a string
# and a string can be part of a string.
# Remember, a string is made of substrings
# (sequences of characters).
'1' in '1234'
How to Write Important String Methods in Python TOP
Len( ) Function
Get the length of a string using the len() function:
# The code below will assign the integer
# value 14 to x because there are 14
# characters in the string stored in the
# greeting variable.
greeting = "happy birthday"
x = len(greeting)Upper( ) Method
Turn a string into uppercase using the upper() method:
NOTE: Because strings are immutable (cannot change once they're created), calling the upper() method will actually create a new version of the string, with all characters in uppercase, but will NOT modify the original string stored in the greeting variable.
# The code below prints
# HAPPY
greeting = 'happy'
print(greeting.upper())Lower( ) Method
Turn a string into lowercase using the lower() method:
NOTE: Because strings are immutable (cannot change once they're created), calling the lower() method will actually create a new version of the string, with all characters in lower case, but will NOT modify the original string stored in the greeting variable.
# The code below prints
# happy
greeting = 'HaPPy'
print(greeting.lower())Split( ) Method
Split a string into substrings using the split() method:
NOTE: By default, split() will split based on white spaces, so it can be used to split a string into words. Because strings are immutable (cannot change once they're created), the string that is split will NOT be modified. Instead, a list object will be created with the string subparts.
# The code below will assign x to be the following list
# ['G', '', 'd m', 'rning, sunshine!']
my_string = "Good morning, sunshine!"
x = my_string.split('o')
Join( ) Method
Join a list if strings into one string using the join() method:
NOTE: join() is a method on a string. The string you call join() will be the string that will be inserted between the strings in the list passed as an argument. This list contains the string you want to join.
# After running the code below, the string x will be
# "Spring, Summer, Fall, Winter"
seasons = ['Spring', 'Summer', 'Fall', 'Winter']
x = ", ".join(seasons)
# After running the code below, the string x will be
# "Spring--Summer--Fall--Winter"
seasons = ['Spring', 'Summer', 'Fall', 'Winter']
x = "--".join(seasons)
Strip( ) Method
Remove leading and trailing white space characters from a string using the strip() method:
NOTE: The strip() method only removes space characters from the beginning and end of the string. The spaces in the middle of the strings are left untouched. Because strings are immutable (cannot change once they're created), the string will not actually be modified. Instead, the strip() method will create and return a new string object with the white space characters removed.
# The code below will create a variable x that stores the following string:
# 'Python is great!'
text = " Python is great! "
x = text.strip()
Isnumeric( ) Method
Check if a string contains a numerical value using the isnumeric() method:
# The code below returns True because
# the string '12' is a numeric value
'12'.isnumeric()
# The code below returns False because
# the string '12a' is not a numeric value
'12a'.isnumeric()
Replace( ) Method
Replace part of a string with another string using the replace() method:
NOTE: Because strings are immutable (cannot be modified in place), the replace() method actually creates and returns a new string which contains the replacement. The original string is not modified.
# After running the code below, the variable x will store the string:
# '1 and 2 and 3'
text = 'one and two and three'
x = text.replace('one', '1').replace('two', '2').replace('three', '3')
# The variable text will still store the string:
# 'one and two and three'
How to Format Strings in Python TOP
Format( ) Method
Format strings using the format() method:
# The code below will print:
# 'The name is Bond'
agent = 'Bond'
print('The name is {}'.format(agent))
# The code below will print:
# 'The sum is: 2,340.76. The recipient is Bond.'
agent = 'Bond'
s = 2340.75534343
print('The sum is {:,.2f}. The recipient is {}.'.format(s, agent))
# The code below will print:
# 'My favorite number is 11,101,202.'
fav_number = 11_101_202
print('My favorite number is {:,d}.'.format(fav_number))
F-Strings
Format strings using f-strings:
NOTE: To format using f-strings, all you need to do is place an f right before your string (see code examples below). When you do that, you can place variables and formatting specifications between curly braces and the value of those variables will be formatted according to the specifications and embedded into the string.
# The code below will print:
# 'The name is Bond'
agent = 'Bond'
print(f'The name is {agent}')
# The code below will print:
# 'The sum is: 2,340.76. The recipient is Bond.'
agent = 'Bond'
s = 2340.75534343
print(f'The sum is {s:,.2f}. The recipient is {agent}.')
# The code below will print:
# 'My favorite number is 11,101,202.'
fav_number = 11_101_202
print(f'My favorite number is {fav_number:,d}.')
How to Write Lists in Python TOP
- Python data types used for storing ordered sequences of objects.
- The objects inside a list can be of any data type: strings, integers, tuples, dictionaries, even other lists.
- Lists are wrapped between square brackets []
- To access items in lists, you can use indexing and slicing (similar to accessing substrings in a string)
Examples of Lists
You can create a list that contains no items (empty list):
empty_list = []
You can create lists that contain strings:
cities = ['Paris', 'Rome', 'New York']You can create lists that contain integers and floats:
numbers = [5, 7.2, 4.3, 2]You can create lists that contain mixed data types:
person_info = ['blue', 6, 120.5, ['Amsterdam', 'Barcelona']]You can create lists of lists:
list_of_lists = [[1, 2 , 3 ], [5, 6, 7]]
Create a List From a String
How to create a list from a string (how to extract characters from a string):
Given a string, you can create a list that contains all the characters in the string.
# After the code below gets executed, the
# variable characters will store the following list of strings:
# ['b', 'a', 's', 'k', 'e', 't', 'b', 'a', 'l', 'l']
sport = 'basketball'
characters = list(sport)
How to Write List Indexing and Slicing in Python TOP
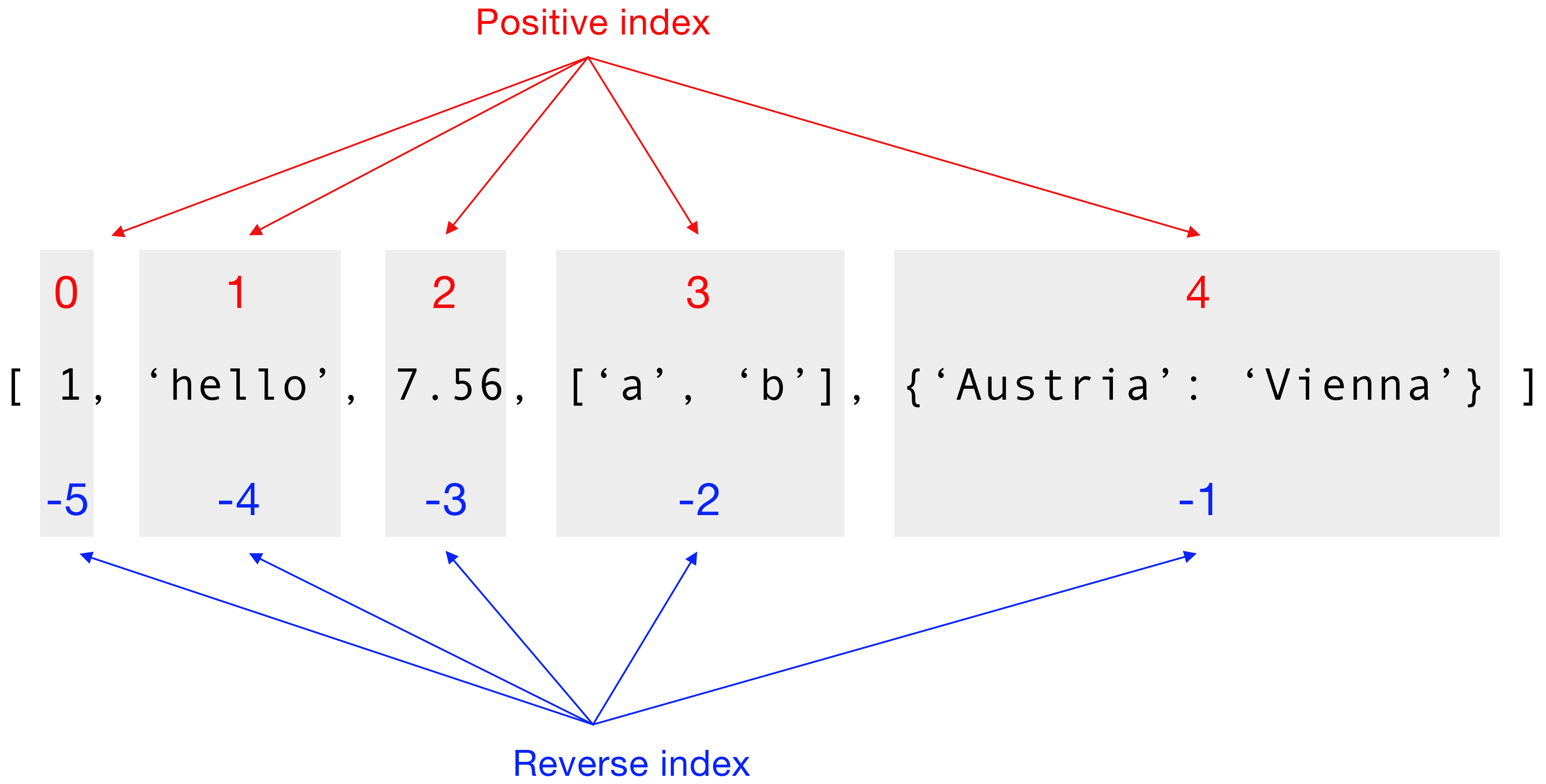
Image Source: Positive and reverse indexing, Edlitera
An index is an integer number that indicates the location of an item in a sequence. Lists are sequences of objects (strings, integers, other lists, etc.). Therefore, you can use integer numbers to access specific items in a list or specific subsets of a list.
Positive Index
Counts ascending from left to right, starting at 0 (see image above).
Negative (Reverse) Index
Counts descending from right to left, starting at -1 (see image above).
Access Individual Items in a List Using Indexes
For the examples below, consider the following example list, consisting of 5 items: the integer 1, the string 'hello', the floating point number 7.56, the list ['a', 'b'] and the dictionary {'Austria': 'Vienna'}:
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'} ]How to access the first item in a list:
data[0]How to access the last item in a list:
data[-1]How to access the 4th item in a list:
data[3]CAUTION: Because the counting starts at 0, the 4th item (or object, however you prefer to call it) in the list is actually at index 3. This is easy to verify by counting: the 1st item is at index 0, the 2nd item is at index 1, the third item is at index 2 and the 4th item is at index 3.
Access Subsets of a List Using Indexes (Slicing)
This operation is also called slicing.
For the examples below, consider the following list:
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'} ]How to get the first 3 items in a list:
data[:3]How to get the last 3 items in a list:
data[-3:]How to get all items starting at index 1 (2nd item), going all the way up to and including the item at index 3 (4th item) in the list:
# The code below will print
# ['hello', 7.56, ['a', 'b']]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'} ]
print(data[1:4])How to get every other item in a list:
# The code below will print every other character in the original string:
# [1, 7.56, {'Austria': 'Vienna'}]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'} ]
print(data[::2])How to print every n-th item in a list:
# The code below will print
# [1, ['a', 'b'], 8]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8 ]
print(data[::3])
# The code below will print
# ['hello', {'Austria': 'Vienna'}]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8 ]
print(data[1:5:3])How to reverse a list using the slicing notation:
# The code below will print the reverse of the original list:
# [8, 7, {'Austria': 'Vienna'}, ['a', 'b'], 7.56, 'hello', 1]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8 ]
print(data[::-1])General Rule for Extracting Subsets From a List:
list_variable[start_index:stop_index:step_size]
Where to use this notation:
- start_index indicates the index where you should start
- end_index indicates the index where you should end (this will not be included in the result!)
- step_size indicates how many items to skip at each step
Notes:
- The start_index, end_index and step_size are all optional
- The element at end_index will not actually be returned
- step_size can be negative (you can return the reverse of a list)
How to Use List Operations in Python TOP
Modify Items in a List
NOTE: Lists are mutable objects (they can be modified in place). Therefore, you can change specific items in a list by simply accessing them using the index notation and placing a new item in the list at that specific index.
# The code below will replace the string 'hello' (the item at index 1 in the list)
# with the string 'good-bye' and will print:
# [1, 'good-bye', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8 ]
data[1] = 'good-bye'
print(data)
Modify Sections of a List at Once
NOTE: Lists are mutable objects (they can be modified in place). Therefore, you can change entire sections of a list by simply accessing them using the slicing notation and placing new items in the list at that specific location.
# The code below will replace the second, third and fourth
# items in the list with the integers 2 and 3 and will print:
# [1, 2, 3, {'Austria': 'Vienna'}, 7, 8]
data = [ 1, 'hello', 7.56, ['a', 'b'], {'Austria': 'Vienna'}, 7, 8 ]
data[1:4] = [2, 3]
print(data)Append( ) method
Add items at the end of a list using the append() method:
NOTE: Because lists are mutable (they can be modified in place), most list methods will modify the list in place and return the value None, instead of returning a different list with the requested modifications.
# The code below will add the integer 5 to the list
numbers = [1, 2, 3, 4]
numbers.append(5)
# The code below will print:
# [1, 2, 3, 4, 5]
numbers = [1, 2, 3, 4]
numbers.append(5)
print(numbers)
# The code below will print None,
# but the list numbers will still be modified:
numbers = [1, 2, 3, 4]
print(numbers.append(5))Pop( ) Method
Remove the last item of a list and store it in a variable using the pop() method:
# After the code below executes,
# the numbers variable will contain the list [1, 2, 3, 4]
# and the digit variable will contain the integer 5
numbers = [1, 2, 3, 4, 5]
digit = numbers.pop()Remove the item at a specific index from a list and store it in a variable using the pop() method:
# After the code below executes,
# the numbers variable will contain the list [1, 2, 4, 5]
# and the digit variable will contain the integer 3
numbers = [1, 2, 3, 4, 5]
digit = numbers.pop(2)
Del( ) Function
Another way to remove (delete) items from a list, using the del() function:
NOTE: The del() function returns the value None. If you want to keep track of the object removed from the list, check out the pop() method above. The del() function will mutate (modify) the list in place!
# After the code below executes,
# the numbers variable will contain the list [1, 2, 4, 5]
numbers = [1, 2, 3, 4, 5]
del(numbers[2])Concatenate Multiple Lists
Concatenate (combine) multiple lists Into a single list:
NOTE: The + operator is overloaded to allow you to combine multiple lists into a single list.
# After the code below execute, the variable
# all_numbers will store the following list:
# [1, 2, 3, 4, 5]
numbers1 = [1, 2, 3]
numbers2 = [4, 5]
all_numbers = numbers1 + numbers2
# numbers1 and numbers2 will NOT be modified!Sort( ) Method
Sort a list in ascending order using the sort() method:
NOTE: Because lists are mutable (can be modified in place), the sort() method will actually sort the list in place. No other list object will be created.
CAUTION: The sort() method will return None!
# After the code below executes, the variable
# numbers will contain the following list:
# [1, 2, 3, 4, 5]
numbers = [3, 4, 2, 1, 5]
numbers.sort()
# The code below will print None!
numbers = [3, 4, 2, 1, 5]
print(numbers.sort())
# Be careful! DO NOT right code like this.
# It will actually set the variable numbers to None.
numbers = [3, 4, 2, 1, 5]
numbers = numbers.sort() # don't do this!CAUTION: You can only sort a list if all the items in the list can be compared to each other! For example, a list containing both strings and integers, CANNOT be sorted with the sort() method.
# The code below will NOT work.
# A TypeError will be raised.
numbers = [3, 4, 2, '1', '5']
numbers.sort()Sort(Reverse=True) Method
Sort a list in descending order using the sort(reverse=True) method:
NOTE: Because lists are mutable (can be modified in place), the sort(reverse=True) method will actually sort the list in place, in reverse order. No other list object will be created.
CAUTION: The sort(reverse=True) method will return None!
# After the code below executes, the variable
# numbers will contain the following list:
# [5, 4, 3, 2, 1]
numbers = [3, 4, 2, 1, 5]
numbers.sort(reverse=True)
# The code below will print None!
numbers = [3, 4, 2, 1, 5]
print(numbers.sort(reverse=True))
# Be careful! DO NOT write code like this.
# It will actually set the variable numbers to None.
numbers = [3, 4, 2, 1, 5]
numbers = numbers.sort(reverse=True) # don't do this!CAUTION: You can only sort a list if all the items in the list can be compared to each other! For example, a list containing both strings and integers, CANNOT be sorted in descending order with the sort(reverse=True) method.
# The code below will NOT work.
# A TypeError will be raised.
numbers = [3, 4, 2, '1', '5']
numbers.sort(reverse=True)
Reverse( ) Method
Reverse a list using the reverse() method:
NOTE: The reverse() method DOES NOT sort a list. It simply modifies the list such that the items are in the reverse order. The reverse() method will modify the list in place and will return the value None.
# After the code below executes, the
# numbers variable will store the list:
# [5, 1, 2, 4, 3]
numbers = [3, 4, 2, 1, 5]
numbers.reverse()
# The code below will print None!
numbers = [3, 4, 2, 1, 5]
print(numbers.reverse())
# Be careful! DO NOT write code like this.
# It will actually set the variable numbers to None.
numbers = [3, 4, 2, 1, 5]
numbers = numbers.reverse() # don't do this!Copy( ) Method
Make a Copy of a List
NOTE: Pay attention to the distinction between modifying an object and modifying a copy of an object (which is a different object altogether). In the example below, other_numbers and numbers refer to the same object (the same piece of memory). Therefore, making a change to other_numbers will actually modify numbers as well! This is often a cause for subtle bugs.
numbers = [1, 2, 3, 4]
other_numbers = numbers
other_numbers[0] = -1
# This will print [-1, 2, 3, 4]
print(other_numbers)
# This will ALSO print [-1, 2, 3, 4] !!
print(numbers)You can make a copy of a list using the copy() method:
In the example below, other_numbers and numbers point to different objects. Modifying other_numbers WILL NOT modify numbers.
numbers = [1, 2, 3, 4]
other_numbers = numbers.copy()
other_numbers[0] = -1
# This will print [-1, 2, 3, 4]
print(other_numbers)
# This will print [1, 2, 3, 4]
print(numbers)You can also quickly make a copy of a list using the [:] index notation:
In the example below, other_numbers and numbers point to different objects. Modifying other_numbers WILL NOT modify numbers.
numbers = [1, 2, 3, 4]
other_numbers = numbers[:]
other_numbers[0] = -1
# This will print [-1, 2, 3, 4]
print(other_numbers)
# This will print [1, 2, 3, 4]
print(numbers)
How to Write Tuples in Python TOP
- Python data types used for storing ordered sequences of objects.
- The objects inside a tuple can be of any data type: strings, integers, tuples, dictionaries, lists, etc.
- Tuples are often wrapped between parentheses ()
- To access items in tuples, you can use indexing and slicing (similar to accessing substrings in a string)
- Items in a tuple are comma separated
- Tuples are immutable: once created, they cannot be modified!
- You cannot add items to a tuple
- You cannot remove items from a tuple
- You cannot replace the objects inside a tuple (however, if the objects can be modified in place, that's ok)
- Tuples are generally more space-efficient than lists (important if you have to store large amounts of data)
- Tuples are generally faster to process than lists (again, important if you have large amounts of data to store / process)
Examples of Tuples
You can create a tuple that contains no items (empty tuple):
empty_tuple = ()
You can create tuples that contain strings:
cities = ('Paris', 'Rome', 'New York')What defines a tuple are not the parentheses, but rather the commas between the items:
# The variable cities below also stores a tuple,
# even though we did not specify the parentheses!
cities = 'Paris', 'Rome', 'New York'Commas in Tuples
Single item tuples still require commas:
Commas are very important for defining a tuple and are even required if the tuple contains a single item. Overlooking this fact often leads to subtle bugs. If your tuple has a single item, you must include a comma after the item.
Generally, you should not include trailing commas if the tuple has 2 or more items:
# This is a tuple
numbers = (1,)
# This is also a tuple
numbers = 1,These are also tuples, though, as mentioned, the trailing commas are not common if the tuple has 2 or more items:
# This is a tuple (not common)
numbers = (1, 2,)
# This is also a tuple (not common)
numbers = 1, 2,NOTE: The code below does NOT define a tuple. Python evaluates the expression between the parentheses and assigns the resulting value to the variable. Since there is no trailing comma (which would indicate a tuple), the entire expression is evaluated to an integer.
# This is NOT a tuple (the comma is missing). This is an integer!
numbers = (1)You can create tuples that contain integers and floats:
numbers = (5, 7.2, 4.3, 2)You can create tuples that contain mixed data types:
person_info = ('blue', 6, 120.5, ['Amsterdam', 'Barcelona'])You can create tuples of tuples:
tuple_of_tuples = ((1, 2 , 3), (5, 6, 7))Create a Tuple From a String
Create a tuple from a string (how to extract characters from a string):
Given a string, you can create a tuple that contains all the characters in the string:
# After the code below gets executed, the
# variable characters will store the following tuple of strings:
# ('b', 'a', 's', 'k', 'e', 't', 'b', 'a', 'l', 'l')
sport = 'basketball'
characters = tuple(sport)Create a Tuple From a List
numbers = tuple([1, 2, 3, 4])Tuple Indexing and Slicing TOP
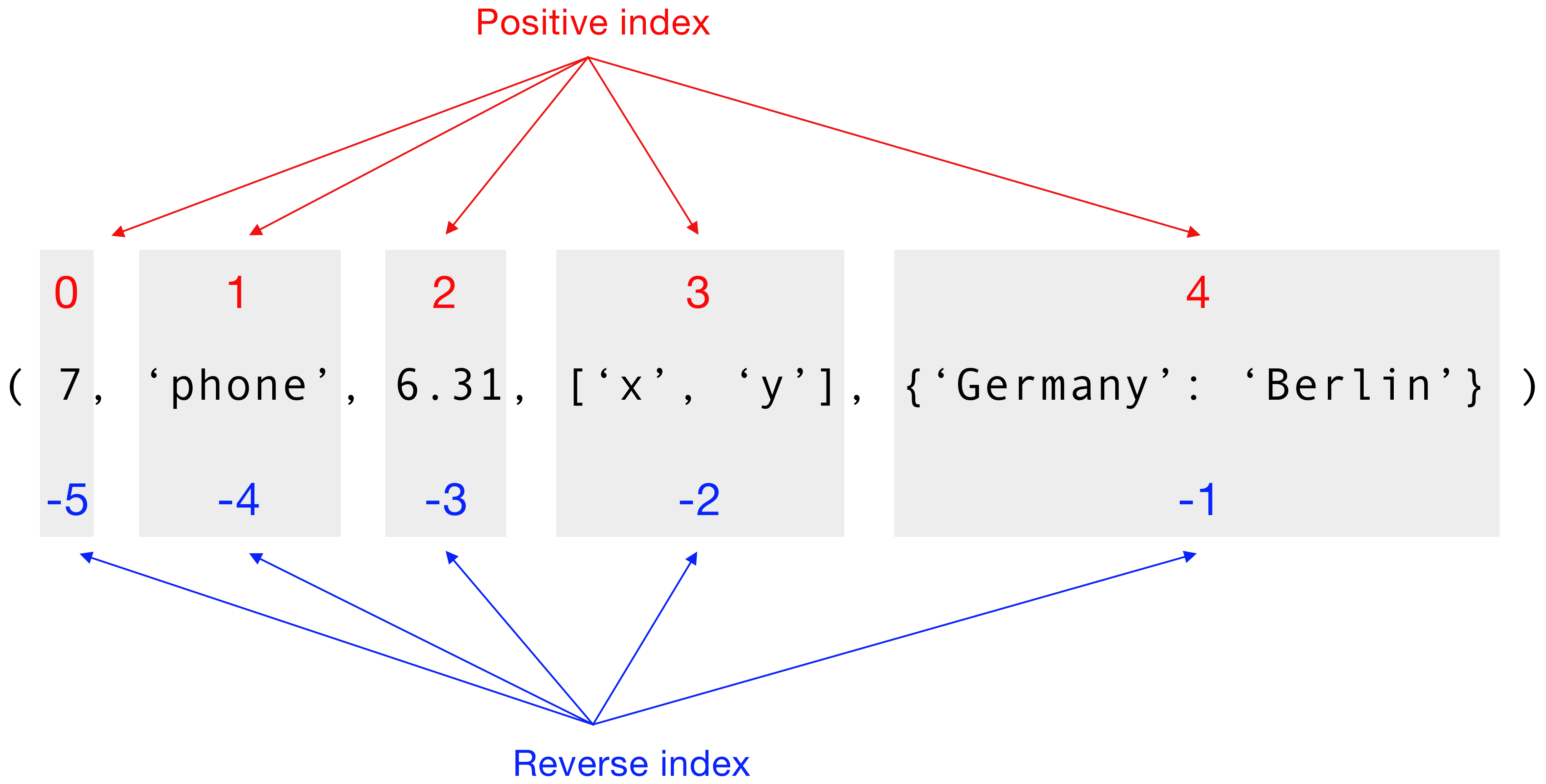
Image Source: Positive indexing and reverse indexing, Edlitera
An index is an integer number that indicates the location of an item in a sequence. Tuples are immutable sequences of objects (strings, integers, other lists, other tuples, etc.). Therefore, you can use integer numbers to access specific items in a tuple or specific subsets of a tuple.
Positive Index
Counts ascending from left to right, starting at 0 (see image above).
Negative (Reverse) Index
Counts descending from right to left, starting at -1 (see image above).
Access Individual Items in a Tuple Using Indexes
For the examples below, consider the following example list, consisting of 5 items: the integer 7, the string 'phone', the floating point number 6.31, the list ['x', 'y'] and the dictionary {'Germany': 'Berlin'}.
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'} )How to access the first item in a tuple:
data[0]How to access the last item in a tuple:
data[-1]How to access the 4th item in a tuple:
data[3]CAUTION: Because the counting starts at 0, the 4th item (or object, however you prefer to call it) in the tuple is actually at index 3. This is easy to verify by counting: the 1st item is at index 0, the 2nd item is at index 1, the 3rd item is at index 2 and the 4th item is at index 3.
Access Subsets of a Tuple Using Indexes (Slicing)
This operation is also called slicing. For the examples below, consider the following tuple:
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'} )How to get the first 3 items in a tuple:
data[:3]This code will return the tuple (7, 'phone', 6.31).
How to get the last 3 items in a tuple:
data[-3:]This code will return the tuple (6.31, ['x', 'y'], {'Germany': 'Berlin'}).
How to get all items starting at index 1 (2nd item), going all the way up to and including the item at index 3 (4th item in the tuple):
# The code below will print
# ('phone', 6.31, ['x', 'y'])
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'} )
print(data[1:4])How to get every other item in a tuple:
# The code below will print every other character in the original string:
# (7, 6.31, {'Germany': 'Berlin'})
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'} )
print(data[::2])How to print every n-th item in a tuple:
# The code below will print
# (7, ['x', 'y'], 'a')
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'}, (1, 2), 'a' )
print(data[::3])
# The code below will print
# ('phone', {'Germany': 'Berlin'})
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'}, (1, 2), 'a' )
print(data[1:5:3])How to reverse a tuple using the slicing notation:
# The code below will print the reverse of the original tuple:
# ('a', (1, 2), {'Germany': 'Berlin'}, ['x', 'y'], 6.31, 'phone', 7)
data = ( 7, 'phone', 6.31, ['x', 'y'], {'Germany': 'Berlin'}, (1, 2), 'a' )
print(data[::-1])NOTE: The code above DOES NOT modify the tuple. Instead, a new tuple object is created which has the exact items as the original tuple stored in the data variable, but in reverse order.
General Rule for Extracting Subsets From a Tuple:
tuple_variable[start_index:stop_index:step_size]
Where to use this notation:
- start_index indicates the index where you should start
- end_index indicates the index where you should end (this will not be included in the result!)
- step_size indicates how many items to skip at each step
Notes:
- The start_index, end_index and step_size are all optional
- The element at end_index will not actually be returned
- step_size can be negative (you can return the reverse of a tuple)
How to Use Tuple Operations in Python TOP
You CANNOT add new items to a tuple:
# The code below WILL NOT work
numbers = (1, 2, 3)
numbers.append(4)You CANNOT remove items from a tuple:
# The code below WILL NOT work
numbers = (1, 2, 3)
del(numbers[0])You CANNOT replace objects in a tuple with other objects:
# The code below WILL NOT work
numbers = (1, 2, 3)
numbers[0] = 4
# The code below WILL NOT work
letters = ('a', 'b', 'c')
letters[0] = 'x'
# The code below WILL NOT work
data = ((1, 2), (3, 4), (5, 6))
data[0] = (7, 8)
# The code below WILL NOT work
data = ([1, 2], [3, 4], [5, 6])
data[0] = 7You CAN modify objects in a tuple, if the objects themselves are mutable (e.g., lists, dictionaries):
In the example below, the code works because you are not modifying the tuple itself. Instead, you are modifying a list inside a tuple. A list is a mutable object, so it can be modified in place. The tuple doesn't care whether an object changes its contents. What it cares about is that no new object replaces an existing object.
# The code below WILL work.
# After the code executes, data will be:
# ([2, 2], [3, 4], [5, 6])
data = ([1, 2], [3, 4], [5, 6])
data[0][0] = 2
How to Write Dictionaries in Python TOP
- Python data types that consist of pairs of keys mapped to values
- They are unordered collections of data
- The data access pattern usually involves supplying a key and getting the value associated with the key. This is in contrast to lists, tuples, and strings, where access is done via an index.
- Dictionaries are mutable data types. They can be changed in place (pairs can be added, removed, modified, etc.)
- Dictionaries can be nested (e.g. dictionaries can contain other dictionaries)
- The keys in a dictionary can be any object, provided that the data type of the object is immutable
- Strings, integers, floats, booleans, tuples CAN be dictionary keys
- Lists, dictionaries CANNOT be dictionary keys
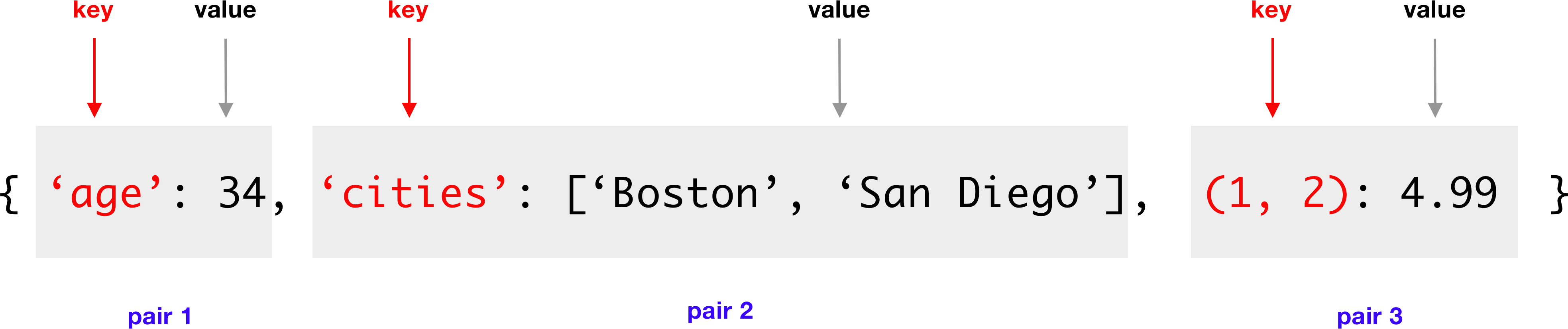
Image Source: Dictionary key-value pairs, Edlitera
Examples of Dictionaries
You can create an empty dictionary, containing no pairs:
empty_dictionary = {}You can create dictionaries mapping any combination of objects. The only requirement is that the keys are immutable:
placements = { 1: 'France', 2: 'Italy' }
food_menu = { 'first': 'soup', 'second': 'pizza' }
numbers = { 0: 4.3, 1: 4.0 }
data = { 21: ['Mary', 'Jack', 'Jill'], 22: (53, 53) }Dictionaries can include other dictionaries as values:
countries = {
'Europe': {
'Germany': 'Berlin',
'Austria': 'Vienna',
'Sweden': 'Stockholm'
},
'North America': {
'USA': 'Washington, D.C.',
'Canada': 'Ottawa'
}
}Create Dictionaries From List of Tuples
Sometimes it's useful to be able to create dictionaries from other data structures. Some of the more common data structures that can be easily turned into dictionaries are:
- List of tuples
- List of lists
# After the code below executes, the variable
# data_dictionary will store the following dictionary:
# {'a': 1, 'b': 2, 'c': 3}
data = [ ('a', 1), ('b', 2), ('c', 3) ]
data_dictionary = dict(data)# After the code below executes, the variable
# data_dictionary will store the following dictionary:
# {'x': 24, 'y': 25, 'z': 26}
data = ( ('x', 24), ('y', 25), ('z', 26) )
data_dictionary = dict(data)How to Use Dictionary Operations in Python TOP
Access Data in a Dictionary
Data in a dictionary CANNOT be accessed by index. Instead, you usually access data in a dictionary by providing a key:
person_attrs = {
'eye_color': 'blue',
'height': 5.7,
'weight': 120.5,
'vacation_cities': ['Amsterdam', 'Barcelona'],
'ids': {
'ssn': '111-00-0000',
'license': 'S000001'
}
}
# The code below prints 120.5, which is the value
# that corresponds to the key 'weight' in the dictionary
# defined above:
print(person_attrs['weight'])
# The code below prints the '111-00-0000'
print(person_attrs['ids']['ssn'])NOTE: You can keep chaining square brackets to chain indexing operations. In the example above, person_attrs is a dictionary. person_attrs['ids'] is also a dictionary, because the key 'ids' is mapped to the dictionary {'ssn': '111-00-0000', 'license': 'S000001'}. Therefore, person_attrs['ids']['ssn'] makes sense: it's a way to access the key 'ssn' in the dictionary mapped to the key 'ids' in the person_attrs dictionary.
NOTE: The specified key must exist. If the specified key does not exist, you will get a KeyError. See the get() method below for a way to access data that will not result in a potential exception.
Access Data in Dictionaries That Contain Nested Data Structures
Consider the following dictionary:
data = {"key_1": 27, 3: [5, 6.0, "number three"]}
To access and print the value 6.0, you need to write code like this:
data[3][1]Consider the following dictionary, which stores information about high and low prices for fictitious stocks xyz and abc:
data = {
'market': {
'prices': [
{ 'xyz': { 'high': 5670, 'low': 5589 } },
{ 'abc': { 'high': 545, 'low': 479 } }
]
}
}To access the low price for stock abc from this dictionary, you would need to write code like this:
data['market']['prices'][1]['abc']['low']TIP: Avoid deeply nested data structures like the one above! They can be tricky to access and can lead to confusion and bugs.
Add New Pairs to a Dictionary
# The code below adds the pair 'c': 3
# to the dictionary stored in the letters variable
letters = {'a': 1, 'b': 2}
letters['c'] = 3In a dictionary pair, the value can be any object, including lists:
# After the code below executes, data will be:
# { 'x': 56, 'y': [1, 2, 3, 4] }
data = { 'x': 56 }
data['y'] = [1, 2, 3, 4]And even other dictionaries:
# After the code below executes, data will be:
# { 'x': 56, 'y': {'greeting': 'hello'} }
data = { 'x': 56 }
data['y'] = {'greeting': 'hello'}Update the Value Mapped to an Existing Key in a Dictionary
You can update a dictionary using the same notation used for accessing data:
# After the code below executes, letters becomes:
# { 'a': 1, 'b': 2, 'c': 100 }
letters = { 'a': 1, 'b': 2, 'c': 3 }
letters['c'] = 100Delete a Pair From a Dictionary
Consider the dictionary below:
data = { 'one': 1, 'two': 2, 'three': 3 }You can delete the pair 'three': 3 using the del function as follows:
del(data['three'])Check if a Dictionary Contains a Given Key Using the in Operator
letters = {'a': 1, 'b': 2, 'c': 3}
# The variable found below will store the
# boolean value True because 'a' is indeed
# a key in the letters dictionary:
found = 'a' in letters
# The variable found below will store the
# boolean value False because 'z' is NOT
# a key in the letters dictionary:
found = 'z' in lettersHow to Use Dictionary Methods in Python TOP
Keys( ) Method
Get the list of dictionary keys using the keys() method:
# After the code below executes,
# dictionary_keys will store the list
# of all the keys in the letters dictionary:
# 'a', 'b', and 'c'
letters = { 'a': 1, 'b': 2, 'c': 3 }
dictionary_keys = letters.keys()
Values( ) Method
Get the list of dictionary values using the values() method:
# After the code below executes,
# dictionary_values will store the list
# of all the values in the letters dictionary:
# 1, 2, and 3
letters = { 'a': 1, 'b': 2, 'c': 3 }
dictionary_values = letters.values()
Items( ) Method
Get a list of dictionary pairs using the items() method:
The code below will print the dictionary pairs as a list of tuples, where the first item in each tuple is the key and the second item in each tuple is the value mapped to that key:
letters = { 'a': 1, 'b': 2, 'c': 3 }
print(letters.items())The code above prints:
dict_items([('a', 1), ('b', 2), ('c', 3)])dict_items is a data type, just like lists, tuples, etc., designed for storing list of dictionary pairs.
For all intents and purposes, the object above is equivalent to:
[('a', 1), ('b', 2), ('c', 3)]
Get( ) Method
Access data in a dictionary using the get() method:
This approach has the added advantage that if the specified key does not exist, an exception will not be thrown. Instead, the value specified in the second argument of the get() method will be returned as the default value.
letters = {'a': 1, 'b': 2, 'c': 3}
# This code will assign the value 2
# to the variable code because the
# specified key 'b' is part of the dictionary
# and it is mapped to the value 2:
code = letters.get('b', None)
# This code will assign the value None
# to the variable code because the
# specified key 'z' does not exist in the
# dictionary:
code = letters.get('z', None)
How to Write Conditionals (if, elif, else) in Python TOP
if current_day == 'Monday':
print('meh')
elif current_day == 'Wednesday':
print('hump day')
elif current_day == 'Thursday' or current_day == 'Friday':
print('almost weekend')
else:
print('yay')
- Python programs are executed top to bottom, line by line.
- Conditionals are code constructs that allow you to control which of the lines of code get executed in different circumstances.
- Conditionals are a way to add "logic" to your code.
- You can have as many elif branches as you need associated with ONE if branch.
- You can have one default else branch that will execute if none of the other branches executed.
- You can have at most ONE else branch.
- Check out the section on comparisons to learn more about the operators you can use when writing conditionals.
The Structure of a Simple if Statement
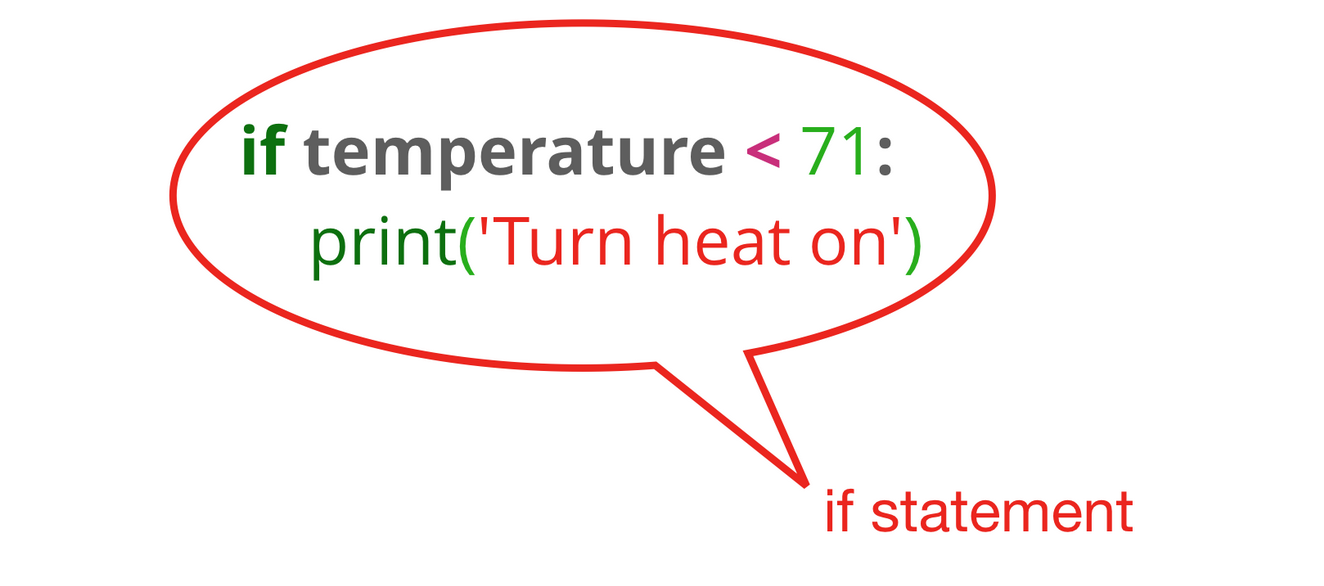
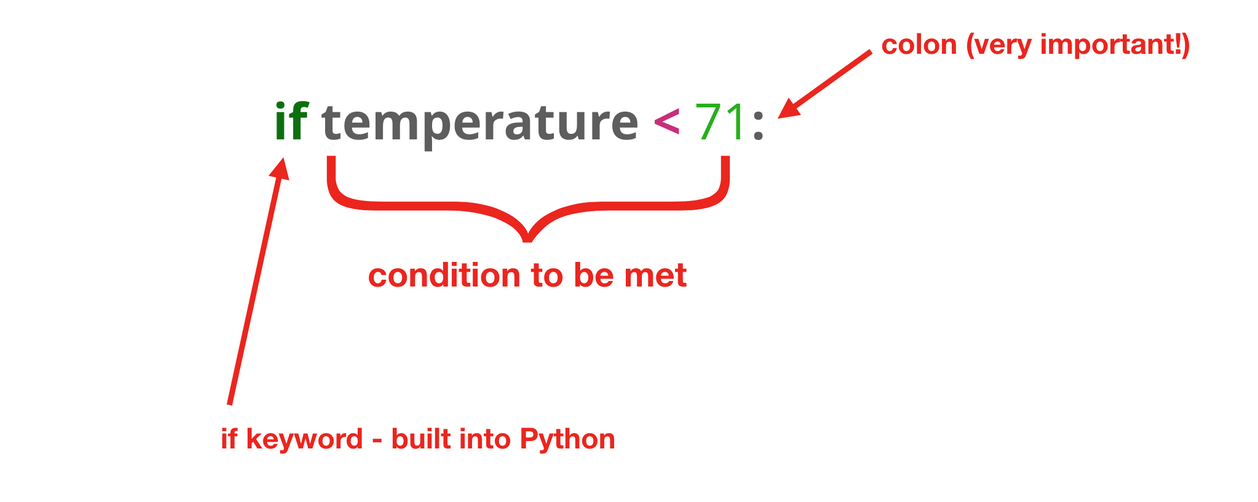
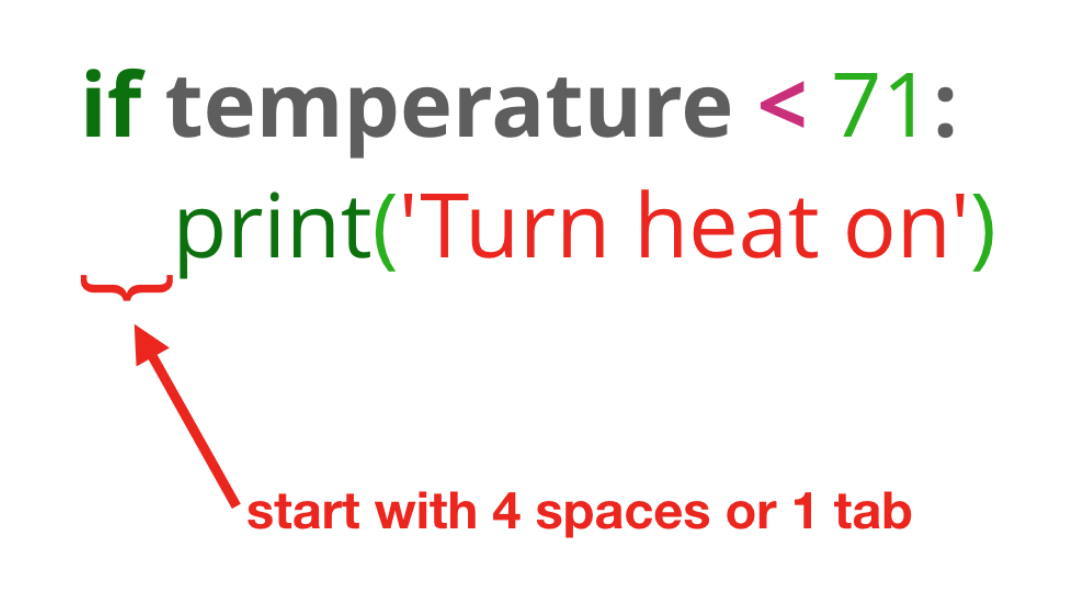
Image Source: The 'if' statement structure in Python, Edlitera
Examples:
The elif and else branches are optional:
The code below will print 'Turn heat off'. The way it works is as follows: the variable temperature will be compared with 71. Because temperature = 75, the expression temperature < 71 will be False, and so next you'll look at the condition on the elif branch. In this case, temperature > 71 is True, so the code INDENTED underneath the elif branch will execute, printing 'Turn heat off'.
temperature = 75
if temperature < 71:
print('Turn heat on')
elif temperature > 71:
print('Turn heat off')You can have nested if statements:
# The code below will print:
# "go to work"
weather_is_nice = True
current_day = "Tuesday"
if weather_is_nice:
if (current_day == "Saturday" or current_day == "Sunday"):
print("go out")
else:
print("go to work")
else:
print("stay home")Remember that objects in Python can be cast to booleans:
Python does this automatically in some cases. For example, if you have a list and you want to execute some code if the list is not empty, you can simply write code like this:
# Python will automatically cast the list some_data
# below to a boolean. Because some_data is an empty
# list, it will be cast to the boolean value False.
# Therefore, the code below will print 'The data is missing'.
some_data = []
if some_data:
print('We have data.')
else:
print('The data is missing.')NOTE: The code above is the "pythonic way" of writing the conditional in this case. The comparison with the empty list object is redundant.
Don't do this:
# DON'T write code like this!
# It's technically correct, but it's
# not preferred.
some_data = []
if some_data == []:
print('We have data.')
else:
print('The data is missing.')

